|
Variable
Chase Speed Option
for #481 and #483 LED Chasers
|
 |
Description
The PWM LED Chaser projects
#481 and #483 have fixed chase speeds determined by the sequence
data and internal timing of the software.
Lots of people have asked for
the option to vary the speed of the chaser using an external control, however this posed
a couple of problems; firstly the speed of each step of each
chase sequence is defined in the data for that sequence and
isn't fixed. Secondly, the PIC16F627 and PIC16F628 don't
have any analogue-to-digital inputs to measure an external
variable resistor.
After some thought and a bit of
prototyping I've come up with a solution to the problem that now
gives the PWM LED Chaser the capability to alter the chase speed
while still using the timing from the sequence data. The
kit can be bought as an option to work with either the
#481 or
#483 LED Chaser Kits and can
be retrofitted to existing kits with a firmware upgrade (download
free from here)
Summary
- The variable speed option
only works with the V3.x.x PWM LED Chaser firmware.
- All #481 / #483 PWM LED
chaser kits shipped after 08-August-2011 include V3.x.x
firmware.
- #481 / #483 PWM LED chaser
kits bought before 08-August-2011 will need the PIC
reprogramming with V3.x.x firmware.
- If you have access to
a PIC programmer the V3.x.x firmware can be downloaded
free-of-charge from this page.
- If you don't have a
PIC programmer a new PIC programmed with the firmware
can be purchased from the
Picprojects eShop
- If you want to buy a
PIC Programmer, see 'Where to
buy a PIC Programmer'
-
V3.x.x firmware supports but does not require the use of the
variable speed option kit. If the option kit is not
installed the LED Chaser functions correctly using internal
timing exactly as the original version 2.x.x firmware did.
-
The UFO Round LED
Chaser kit #432 will not work with
V3.x.x firmware.
-
The new redesigned UFO Round LED
Chaser kit #433 uses the V.3.x.x. firmware with an
alternative sequence data set pre-programmed into the
supplied PIC. The speed control option with miniature
on-board variable resistor are included with the kit #433K.
(see project page
for full details)
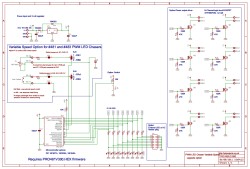
Schematic
Download
schematic in PDF

See the section title '
Variable Speed Option for #481 and #483 PWM LED Chaser' for the
variable speed upgrade. Other areas of the schematic
pertain to the base 481 and Power MOSFET 483 projects.
Circuit Description
To make a variable speed
control I've used a software controlled oscillator. One
output pin of the PIC is switched high and low alternately.
The output is fed via a 10K variable resistor to a capacitor which
is charged and discharged by the output A second pin
configured as an input is connected to the capacitor and
monitored to determine if it is high or low. The output
pin is always driven to the opposite logic level seen on the
input. The input pin buffer inside the PIC uses a Schmitt
trigger which provides the necessary hysteresis for the digital
input. This is also the reason I had to use a link wire to
connect to RA7 port pin as the available port B I/O pins don't
have schmitt triggers on the input buffers.
The chaser sequence has a 'hold
time' value which is individualy defined for each step in a
chase sequence (see
description
of data
)
When running from the internal timer the hold timer counts down
at 10mS intervals (100Hz). When the external timing is
used the hold timer counts down using the software
oscillator at a frequency set by the variable resistor.
Range of speed control
Capacitor C6 is specified as
2.2uF and gives
a good range of speed control both faster and slower than the
internal fixed timing. Increasing it to 10uF will give a
much slower chaser with the fastest speed about the same as the
internal fixed timing, while using a 1uF capacitor results in a
very fast chaser with the slowest speed about the same as the
internal timing. You can also change the variable resistor
(P1) from 10K to 20K or 47K which will give a wider range of
speed control.
 If C6 and the variable resistor are omitted, any clock source
feeding a logic level signal to the PORTA RA7 input can also be
used for the chaser timing.
If C6 and the variable resistor are omitted, any clock source
feeding a logic level signal to the PORTA RA7 input can also be
used for the chaser timing.
The internal or external chase
timing is selected by using a switch connected to PORTB
RB3 input. When left open it is pulled high by the internal
weak pull-up resistor inside the PIC. The software uses the
internal timing when the input is high and the external software
oscillator when it is held low. If you don't want to use the
internal timing and will only use the external variable resistor
for speed control you can omit the switch and just fit a link
wire to the I/O-1 terminal.
IMPORTANT: The circuit can be retrofitted
to existing #481 or #483 chasers provided the PIC is
reprogrammed with V3.0.0 code available to download here
page.
All #481 & #483 kits shipped after 8 August 2011 will be pre-programmed with
the V3.0.0 firmware. Please note, the firmware supports
but does not require the use of the variable speed option kit.
If the option kit is not installed the LED Chaser functions
correctly using internal timing.
Construction
| Please read through
this section once before starting construction so you
have a overview of the assembly details and options.
Click on the photographs for 1024x768 hi-res version.
The construction
photographs below show only the assembly of the
variable speed option to a bare PCB to avoid confusion
with the components in the main kit.
This option can be
retrofitted to existing #481 and #483 PWM LED Chaser
kits providing the PIC firmware is also update (see
here) |
|
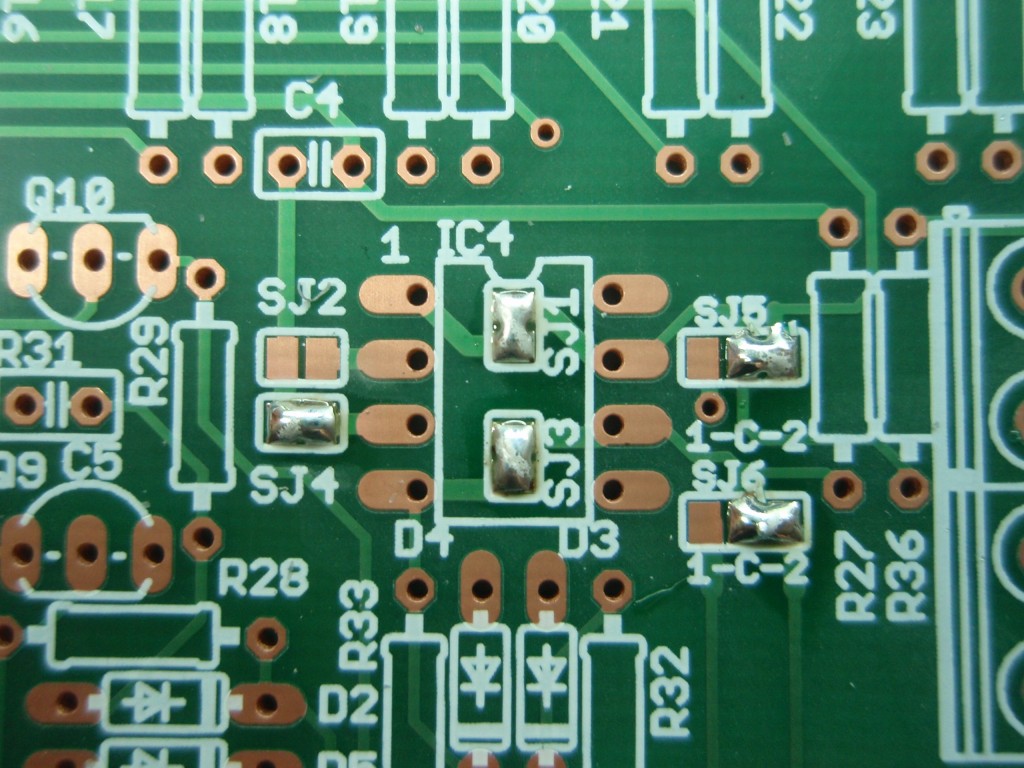
Step 1.
Use solder to bridge the five PCB solder jumper pads SJ1, SJ3,
SJ4, SJ5-C-2, SJ6-C-2 as shown in the photograph.
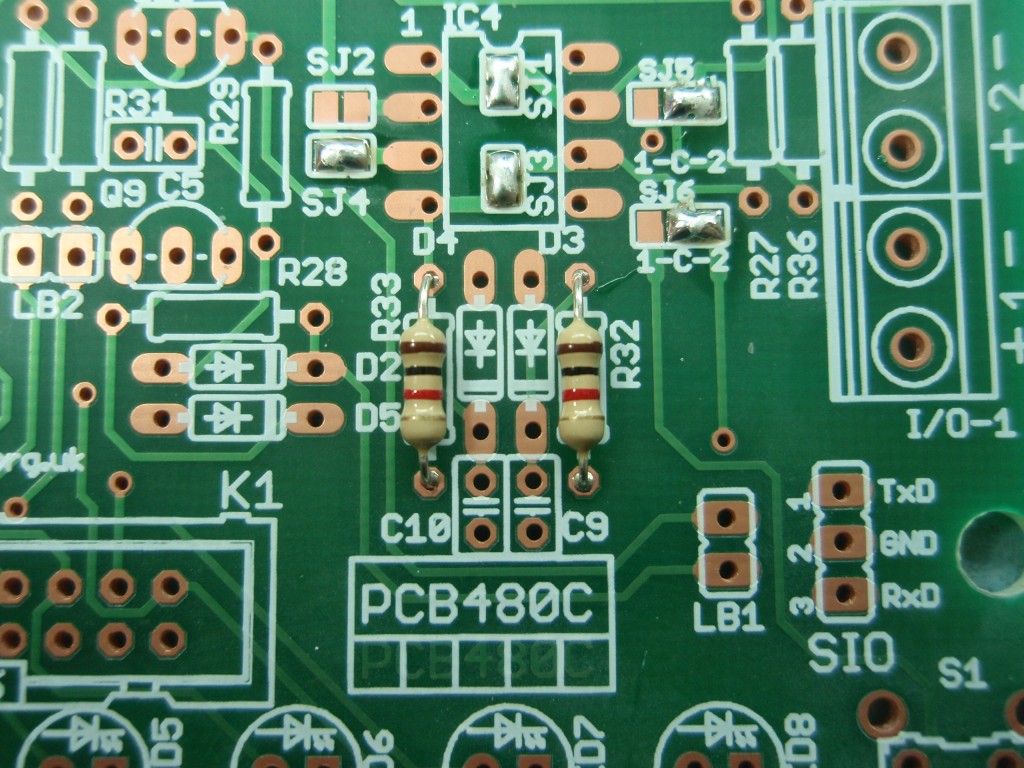
Step 2.
Fit the two 1K resistors to positions R32 and R33
 brown, black, red, gold - 1K0 (R32, R33)
brown, black, red, gold - 1K0 (R32, R33)
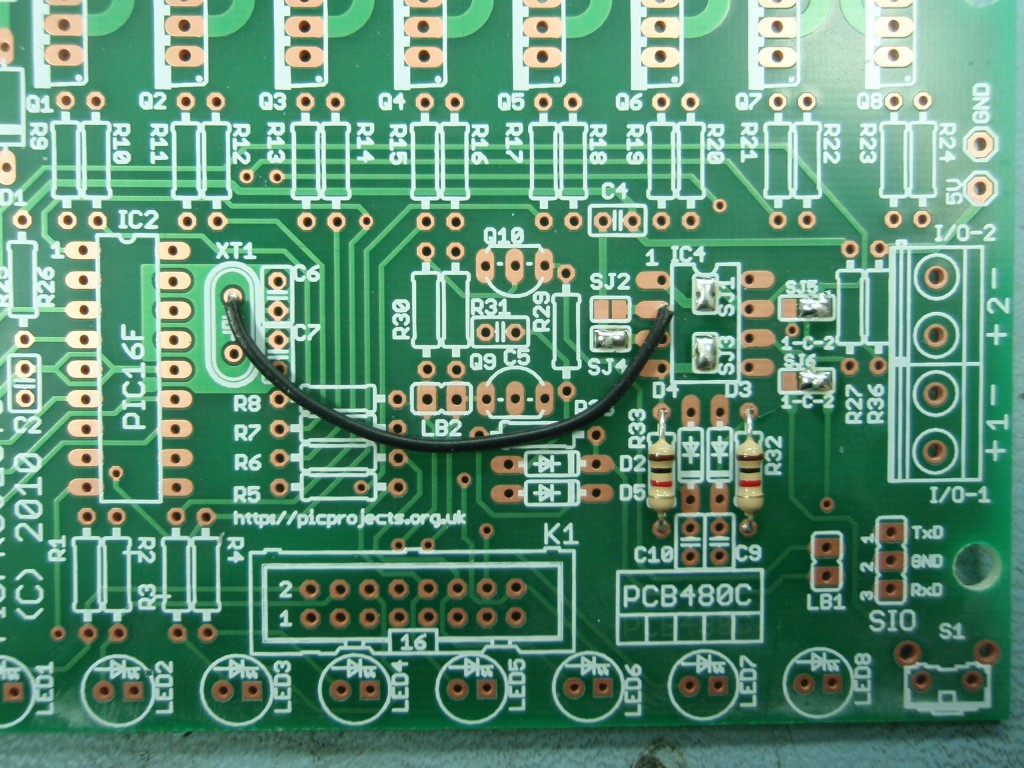
Step 3.
Cut approximately 6cm (2¼") of hook-up wire, strip and tin the ends
and then solder to the PCB.
The wire should link the solder pad from XT1 to the solder pad
of IC4 pin 2 as shown.
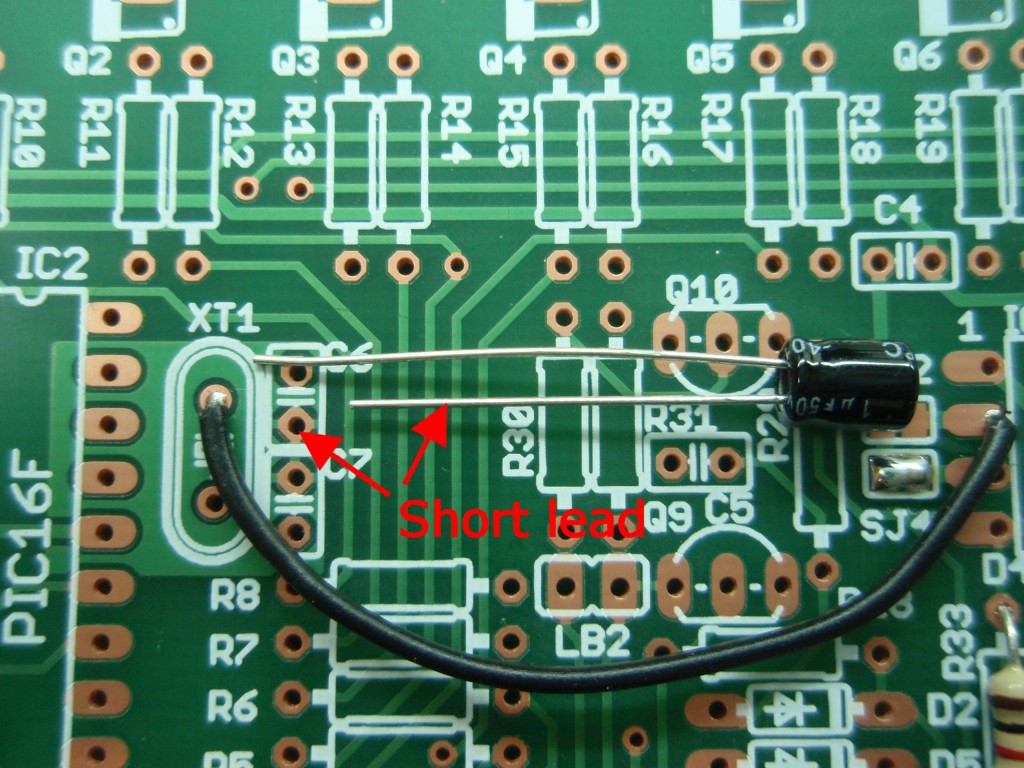
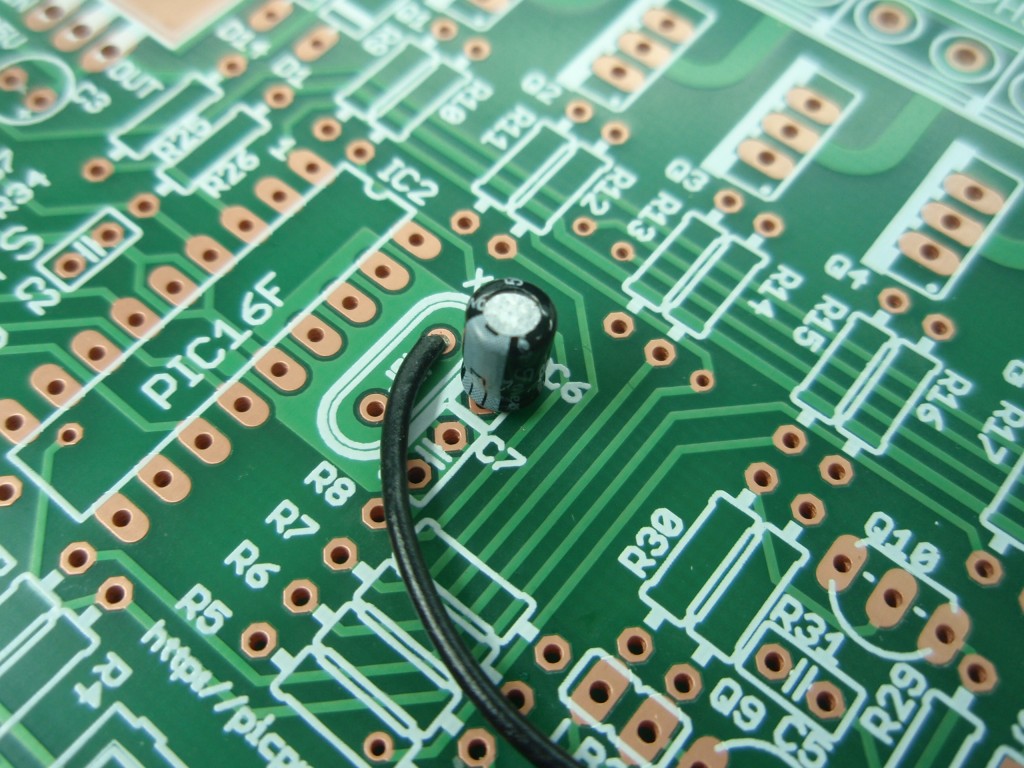
Step 4 /5.
Install the 2.2uF capacitor to position C6 as shown. One
lead is shorter and this must be installed to the correct hole
arrowed in the photograph.
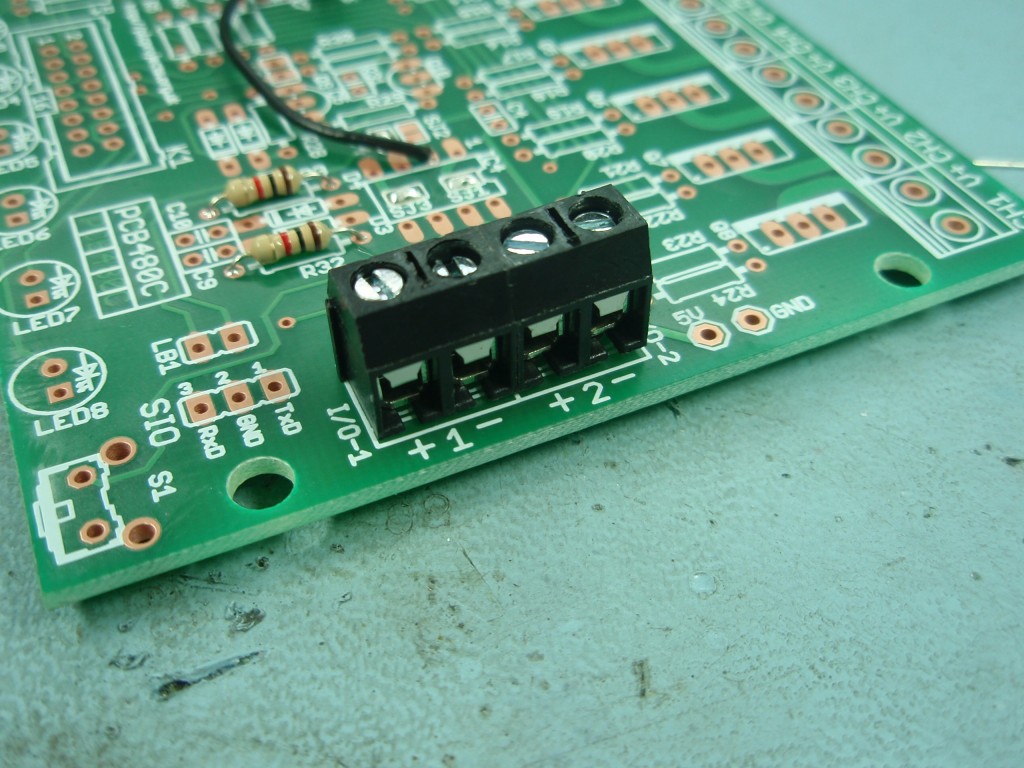
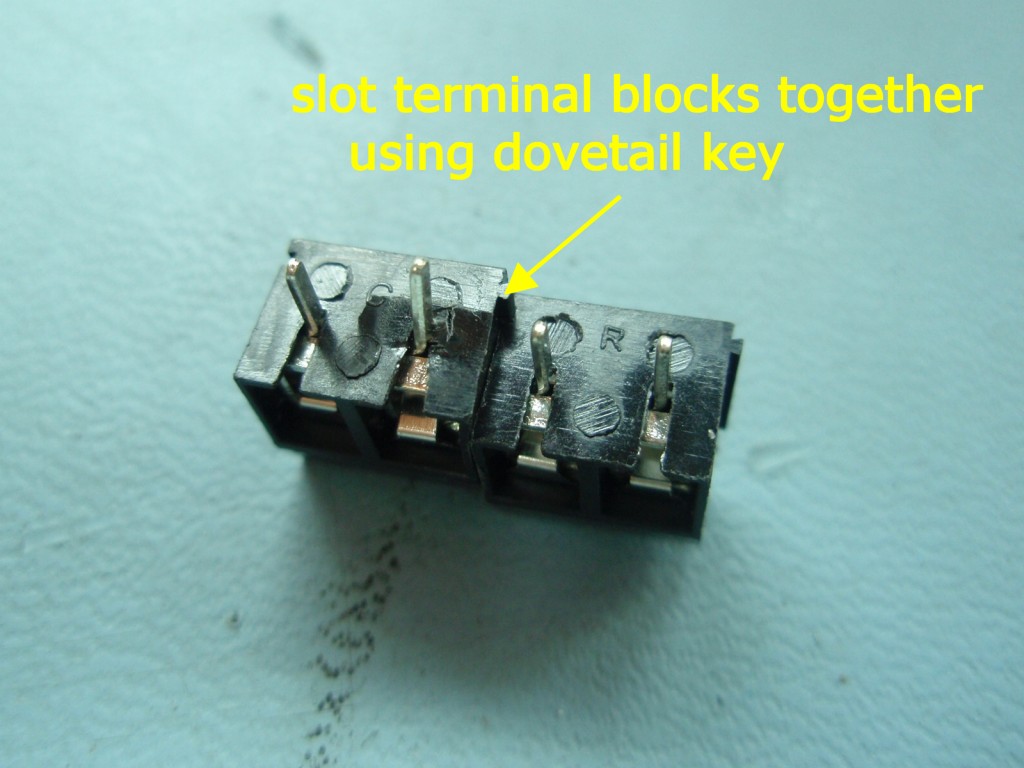
Step 6.
Install the terminal blocks as shown. A pair of two-way
terminal blocks are supplied in the kit. These have a key
and slot in the side of the plastic body to allow them to lock
together forming a single 4-way block.
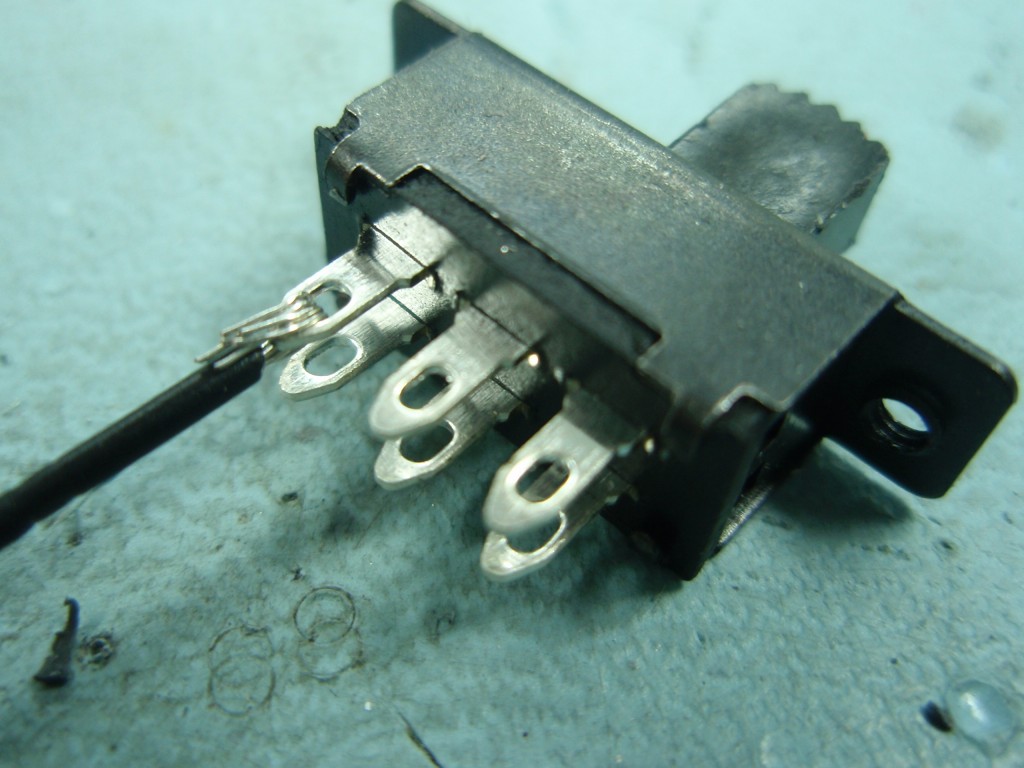
Step 7 / 8. Cut two 10cm
(4")
lengths of hook-up wire.
Solder one end of each wire to
the switch as shown. Only two of the six connections on
the switch are
used.
Switch fixing holes are 2 x M2 on 19mm centres
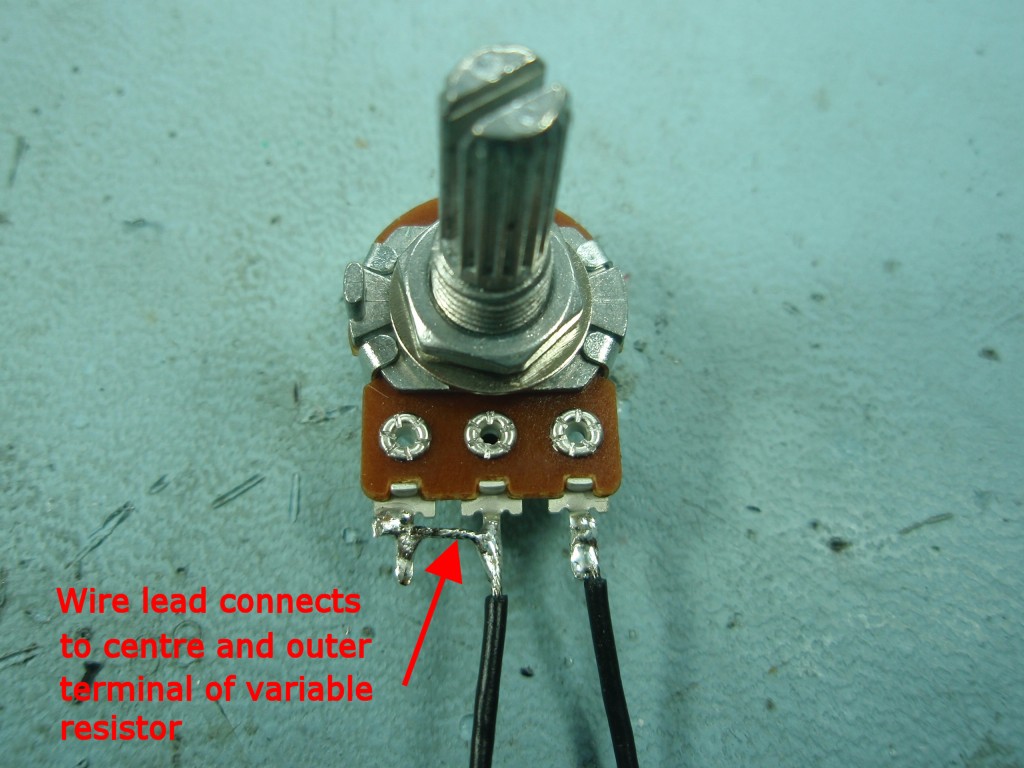
Step 9.
Using the remaining hook-up wire solder two wires to the
10K variable resistor. Note how one wire connects to both the
centre terminal and one outer terminal. To make this connection
strip back 12-15mm (½") of insulation and tin the lead with solder.
Bend into an 'L' shape and solder to both terminals.
The second wire lead connects to the
remaining outer terminal.
The supplied variable resistor has a 6mm diameter control shaft.
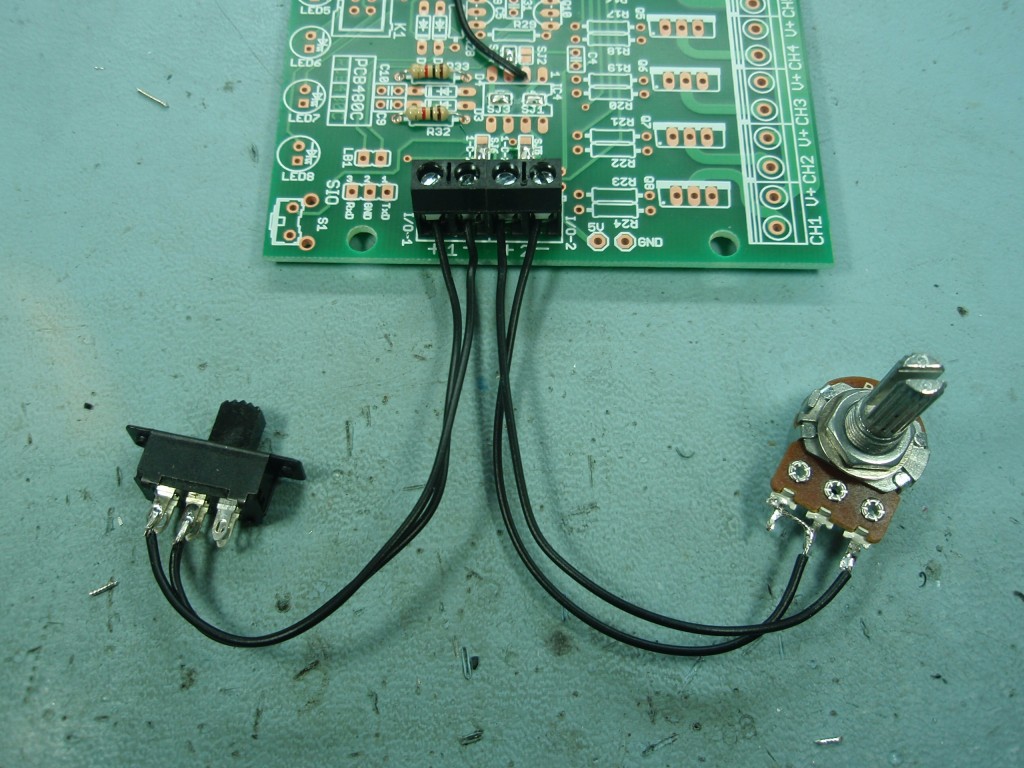
Step 10.
Connect the switch and variable resistor to the terminal block
as shown.
The variable resistor connects to I/O-2, it does not
matter which way round the wires connect.
The switch connects to I/O-1, again it does not matter which way round
the wires connect.
If you will only use the external speed control and don't need
to switch between internal and external timing you can omit the
switch and fit a wire link between the terminals of I/O-1.
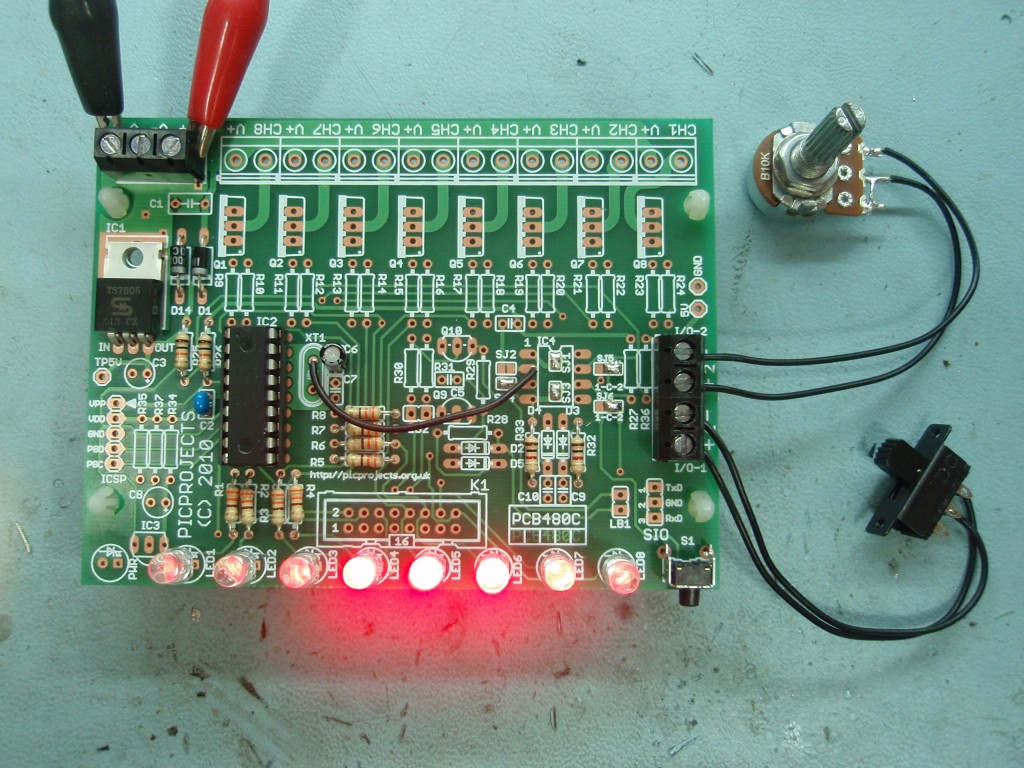
Step 11 / 12.
Shows a #481 Chaser with the variable speed option on an
assembled PCB
Firmware
The variable speed option kit requires V3.0.0 firmware.
All #481 and #483 kits shipped after 8 August 2011 will be pre-programmed with
the V3.0.0 firmware. Please note, the firmware supports
but does not require the use of the variable speed option kit.
If the option kit is not installed the LED Chaser functions
correctly using internal timing.
The PIC microcontroller
requires programming with the firmware which you can download
below.
The HEX files are ready to
program straight into the respective PIC chip. The latest
code version 3.0.1 supports the PIC 16F628/628A only.
The Source code will allow you
to create your own sequences and then reassemble the code to use
them. Quick guide to
reassembling firmware using MPLAB
|
Description |
Filename |
Download link |
| |
|
|
| Source
code for 16F628A |
pro481v301.zip
V3.0.1 21/02/2021 |
 download
download |
HEX file
ready to program into the PIC.
Use with 16F628 / 16F628A only |
pro481v301.HEX
V3.0.1 21/02/2021
Sequence data 13/08/2011 |
download
|
|