Ever since I made the
serial controlled RGB LED PWM driver I've had many requests for an
addressable driver. Well I've finally got round to producing
one. The code is now completed and tested and the prototype
boards are fully working.
The design process behind this
project was to enable anyone with a bit of electronics knowledge to
build an array of cheap RGB LED drivers that they can control from a
PC without having to spend lots of money on expensive hardware,
software etc. I specifically didn't want to go down the DMX512
route as there are hundreds of commercially available products out
there; if you need DMX512 you probably won't be trying to build RGB
controllers on the cheap (however, if you do
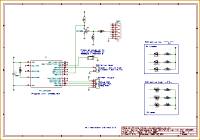
check out this site for a DMX512 RGB LED). The hardware for this project is designed around standard readily
available parts and the serial interface uses a standard PC serial
port and protocols. You should be able to put together a
single controller and get it hooked up to a PC for under £10
(assuming you have a PC)
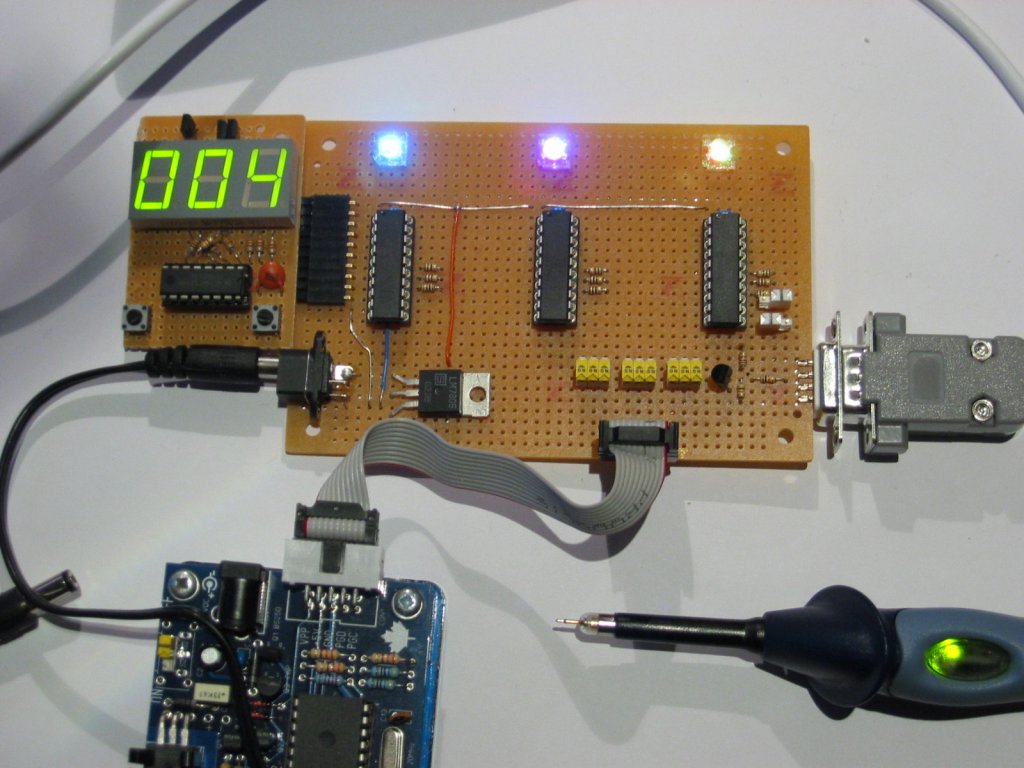
I originally wrote the code to run on a
16F88 but subsequently converted it to run on a 16F690 as these are
about 30% cheaper. The '690 also has 2 extra I/O pins one of
which has been used to enable the full version of the code to drive
either common anode or common cathode 7-segment displays on the
control panel. I've also taken the code for the free RGB
PWM driver and ported it to the PIC 16F628A / 627A. Code and
schematic can be found on this page.
The serial packet protocol is
completely open so anyone can write their own software to control
the drivers. It is described in detail on its own page
here.
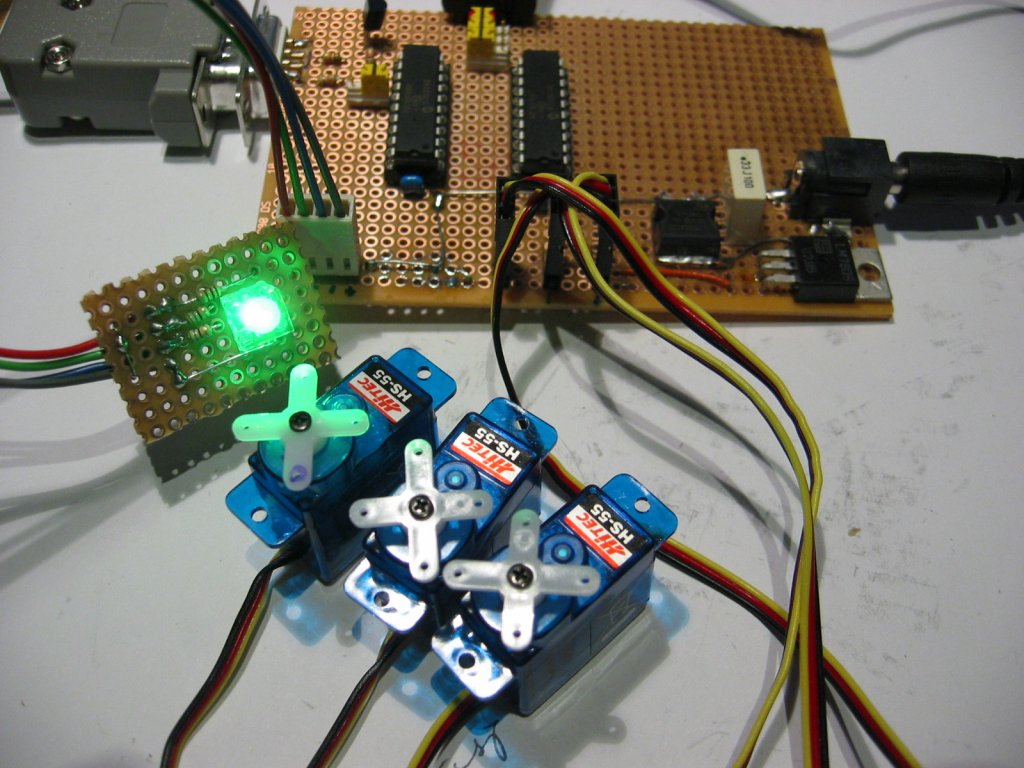
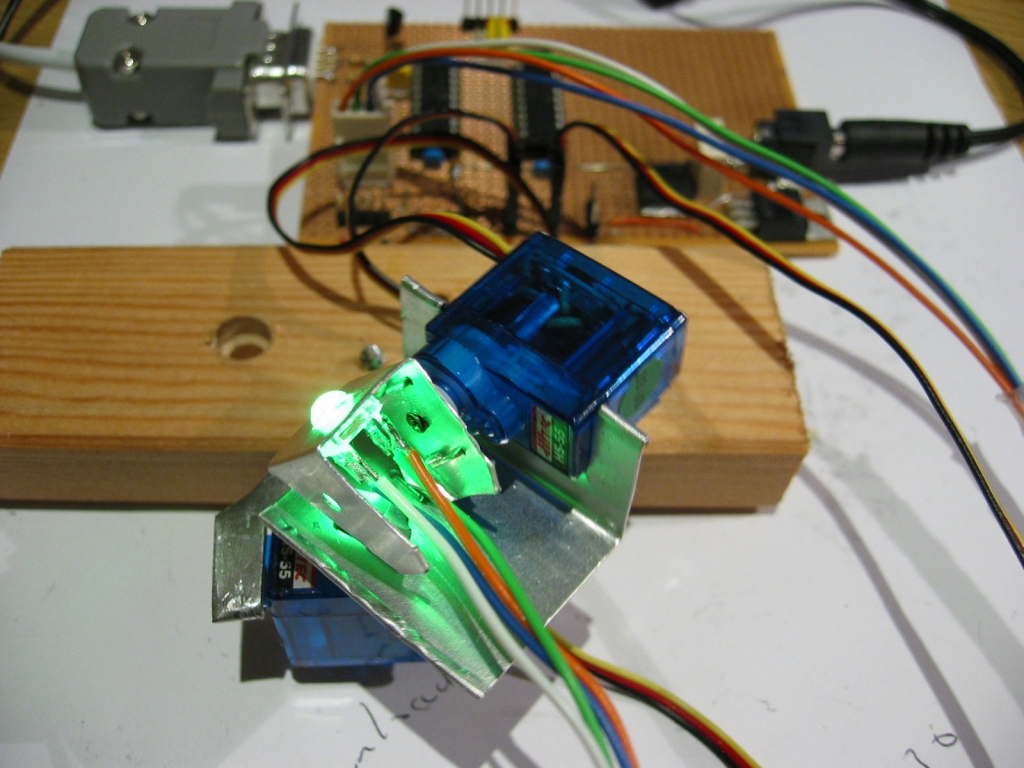
During development I had an enquiry
asking if the PWM output could control a servo. I thought
about this and came up with a three channel RC type servo driver
that operates using the same serial control protocol. This makes it
possible to put RGB Drivers and Servo drivers on the same serial bus
and control them with a common command set. Using the same
algorithm that controls fading on the RGB driver, the three servos
can be made to move at different speeds from one position to another
autonomously.
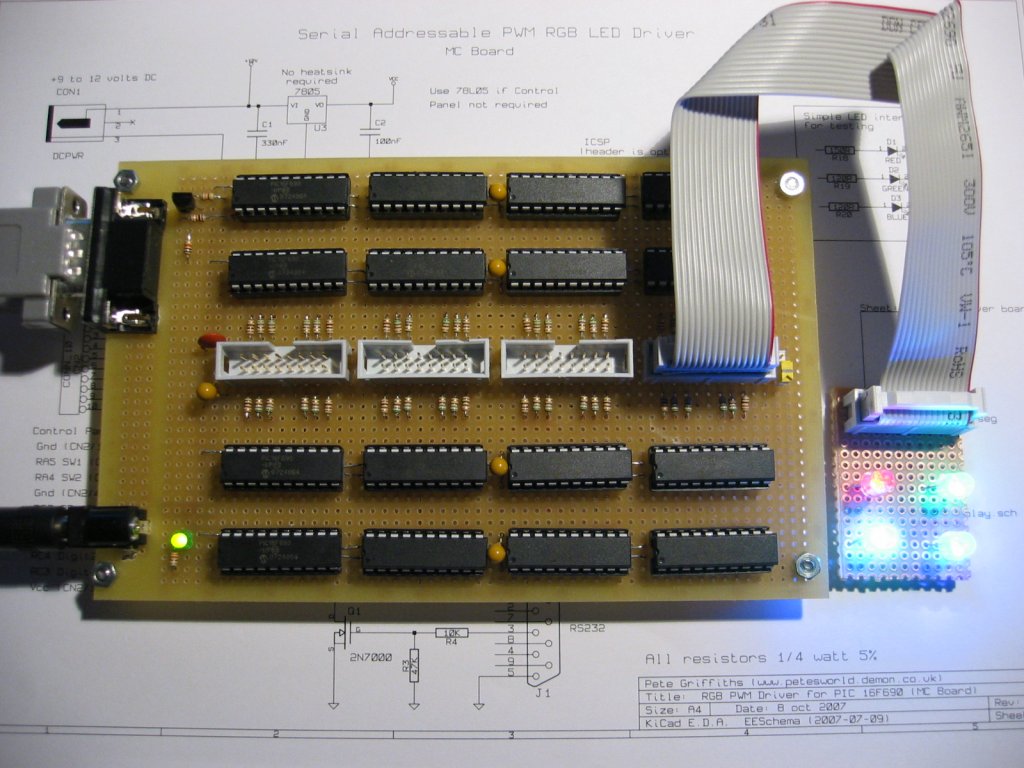
I've deliberately kept the
Microcontroller board separate from any LED driver electronics
because the type of LEDs it could be used to drive, from low power
5mm LEDs to high power 3 watt star LEDs, are wide ranging and the
potential applications enormous. For the same reason, the
control panel display on the full version is also optional and
separated from the main MC board since it might be useful to some,
while not to others.
While I primarily expect people to
use a PC to send the control data to the drivers, there is a lot of
potential for stand-alone controllers and interfaces using low-speed
infrared or 433Mhz RF transceivers. In fact that's one of the
reasons for providing operation at bit rates down to 1200bps.
As time permits I'm am
working on additional LED driver circuits and looking at PCB layouts
as well as the PC software side of things and I'll be making it
available on this page.
If anyone can help out
with PC software to share with other enthusiasts please contact me
as I'm really struggling to find time to do all the work.
Update: Feburary
2008
I had intended to make
two versions of the code available; a basic free version and a full
feature version. I've given up on that so now the full feature version
is available to download for free.
The Full Version of both the RGB and Servo code can be
download free of charge here
|
RGB LED PWM Driver
Feature List for PIC 16F690 |
|
Full version |
| Full 8 bit 3 channel PWM @100Hz |
|
a |
| Support for 128
device, 24 group and one broadcast address |
|
a |
| On board colour fading |
|
a |
| Serial receive bit rate 1200, 2400,
9600bps |
|
a |
| Serial receive bit rate 19200,
38400bps |
|
a |
| Change device address in software |
|
a |
| Change serial bit rate in software |
|
a |
| Jumper selectable active high or
active low PWM output |
|
a |
| Optional 7 segment LED display to
inspect/change address and bit rate |
|
a |
| Software shutdown / enable of PWM
outputs |
|
a |
| Automatic PWM
output shutdown when serial data inactive |
|
a |
| |
|
Download |
|
RGB LED PWM Driver
Feature List for PIC 16F628A |
|
Full version |
| Full 8 bit 3 channel PWM @95Hz |
|
n/a |
| Support for 128
device, 24 group and one broadcast address |
|
n/a |
| Serial receive bit rate 1200, 2400,
9600bps |
|
n/a |
| Change device address in software |
|
n/a |
| Change serial bit rate in software |
|
n/a |
| Jumper selectable active high or
active low PWM output |
|
n/a |
| Software shutdown / enable of PWM
outputs |
|
n/a |
| |
|
|
|
RC Servo Driver
Feature List for PIC 16F690 |
|
Full version |
| 3 channel RC
Servo driver ~18mS refresh |
|
a |
| Support for 128
device, 24 group and one broadcast address |
|
a |
| On board servo
slewing |
|
a |
| Serial receive bit rate 1200, 2400,
9600bps |
|
a |
| Serial receive bit rate 19200,
38400bps |
|
a |
| Change device address in software |
|
a |
| Change serial bit rate in software |
|
a |
| Optional 7 segment LED display to
inspect/change address and bit rate |
|
a |
| Software shutdown / enable of
servo channel outputs |
|
a |
| Automatic servo
channel shutdown when serial data inactive |
|
a |
| |
|
Download |
The RGB Serial Addressable Driver (SAD)
generates 3 x 8-bit PWM outputs at a frequency of ~100Hz. The
PWM outputs can be jumper selected to either active high or active
low to suit different LED driver circuits.
The Servo Serial Addressable Driver
provides three servo channel outputs with a 1-2mS pulse width
refreshing at between ~16 and 19mS.
The SAD receives data over a
standard RS232 serial interface like that found on a Personal
Computer. Data is sent to the SAD in 7 byte packets which
contain either data or commands.
The operation of the serial control
protocol is a two step process.
1. data is sent to the SAD
which latches it but doesn't do anything else with it.
2. a command is then sent to the SAD telling it to transfer
the data to the outputs
This allows different data to be
sent to many drivers while enabling changes to the PWM output to be
initiated across the SADs simultaneously. For example you
might send 10 different colours to ten SADs, then sending a single
transfer command to the broadcast address, the ten SADs all update
their respective outputs with the new colour at the same time.
Any SADs receiving the transfer command that haven't been sent any
new data ignore it.
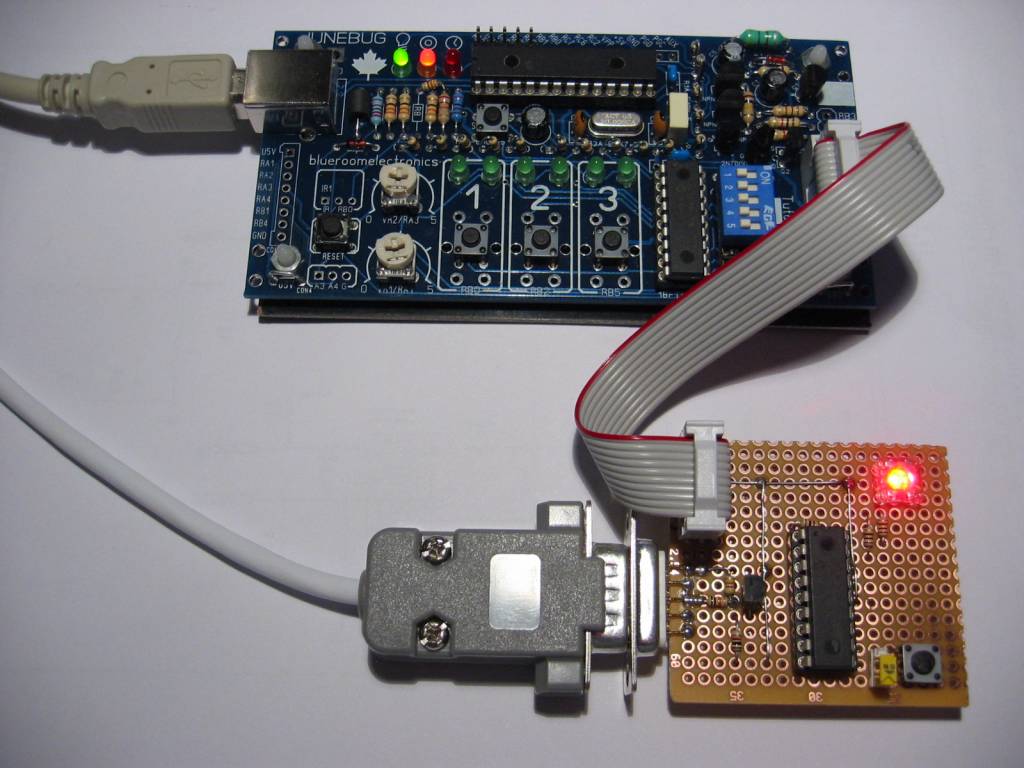
To support the control of the SAD
I've written a couple of applications that run under Windows.
The first is a menu-driven control program that is intended to aid
test and initial configuration of the SAD.
The second application is a command
interpreter that runs under Windows. It uses a simple command
language which I've developed specifically to support the SAD.
Full documentation and file download can be found
here.
When the firmware is
first programmed into the PIC, the default address is 0 and bit rate
is 9,600bps.It can be reset to these defaults at
anytime by grounding RA3 (pin 2) while powering up the SAD. On
the full version with the control panel hardware, holding down SW2
while powering on will also reset it to defaults.
At power on, and after a save
command restart, all three PWM channels are driven at ~4% for 2
seconds to indicate the SAD is active before turning off.
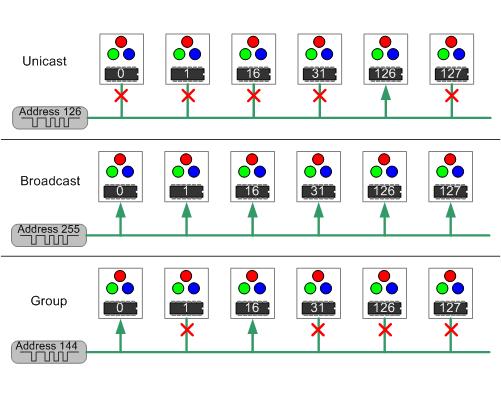
The packet protocol supports three
addressing modes; There are a 128 unique addresses from 0 to
127 which can be user assigned to the individual SADs. A
broadcast address which all SAD will accept packets from. Finally
there is the Group addressing mode; each device has two group
address, a row address and column address.
This is described in more detail on the
Packet Protocol description.
RGB colour and fading data is sent
to the SADs by one of the three addressing modes. The SADs
latch the colour data addressed to them but don't immediately drive
the PWM output with it. The data is only transferred to the
PWM outputs once a Transfer Command has been received. This
allows multiple SADs to be loaded with different RGB data and then,
using either a group, or broadcast address they transfer the new RGB
data simultaneously to the PWM output. The use of group and
broadcast addresses for the transfer does not preclude the use of a
Unicast address if needed.
The SAD can accept data at a
continuous 38400bps which gives a maximum packet rate of ~548
packets/second. It also supports data rates of 19200, 9600,
2400, 1200bps. Both the address and bit rate can be changed by
sending commands to the SAD over the serial interface. The new
settings don't take effect until they have been saved and the SAD
reset.
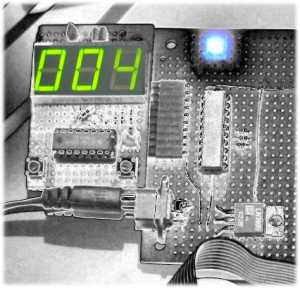
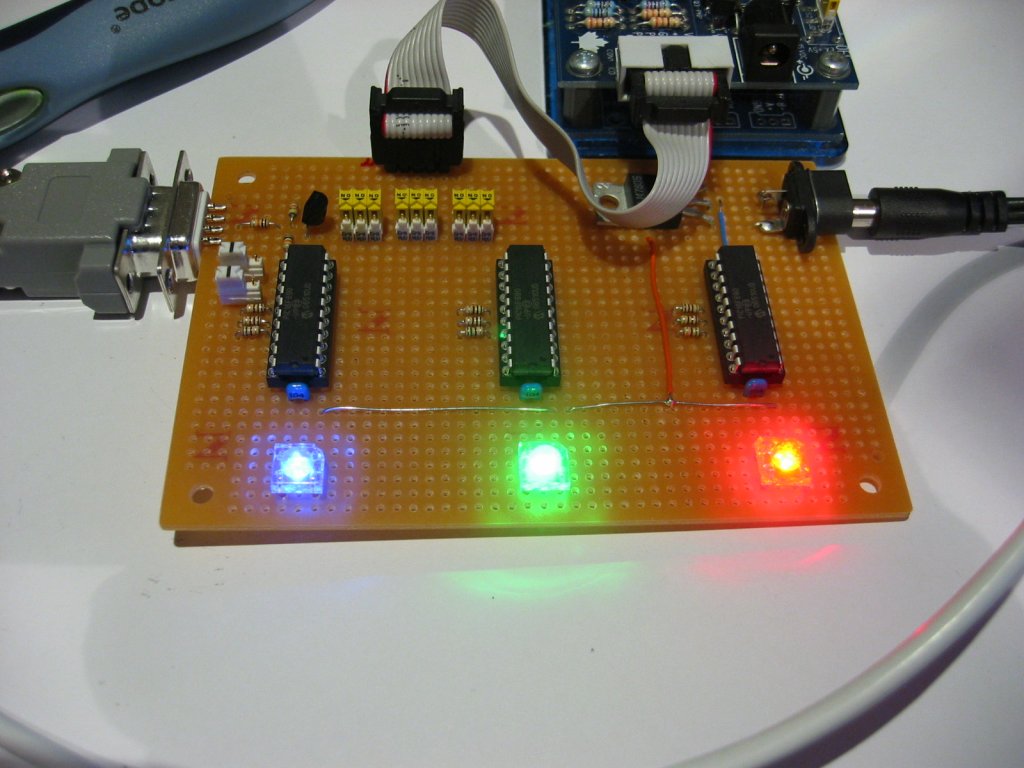
The full version of the SAD
firmware also supports a control panel comprising a 3-digit 7
segment LED display and 2 switches. This allows the current
address, bit rate and auto-shutdown settings to be inspected and if
required changed and saved.
The auto-shutdown feature will turn
off the PWM outputs if no valid packets are received by the SAD
within 260 seconds (4m20s). As soon as a valid packet is received
the shutdown timer is reset and the PWM outputs restart. The
reason for this feature is that when I was driving a number of SADs
from a PC, I wanted them to automatically shutdown their PWM outputs
without having to turn them all off or remember to send a shutdown
command to them before shutting down the PC. By default this feature is inactive. It
is also not available in the free version of the firmware.
Changes made to the address, bit
rate or auto-shutdown settings will not take effect until they have
been saved and the SAD reset. The Save command automatically
resets the SAD once the settings have been written to the on-board
EEPROM (NVRAM)
The full version of the firmware
supports autonomous colour fading. The SAD takes the current
RGB values being output and calculates the required step rates for
each colour to reach the new RGB values at the same time. The
largest difference between current and new values determines how
many steps are required for the fade. The base step rate is
4mS and this is multiplied by the fade rate value sent to the
SAD.
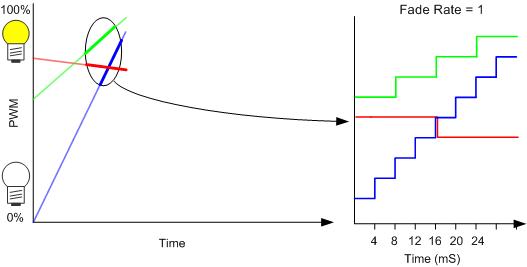
For example. In the
illustration below, the difference between the current and new blue
values is clearly the largest so this is the primary step value. If the current
Blue PWM is 0 and the new PWM value is 250 the number of steps
required is 250-0 = 250. With a fade rate of 1 it takes 4mS x 1 x
250 = 1.00 second to reach the new PWM. The red and green steps are
calculated so that all three colours will arrive at the new values
at the same time.
With larger fade rate values the
number of steps remains constant but the base step rate of 4mS is
multiplied by the fade rate value as the illustration below shows.
(4mS x 5 = 20mS)
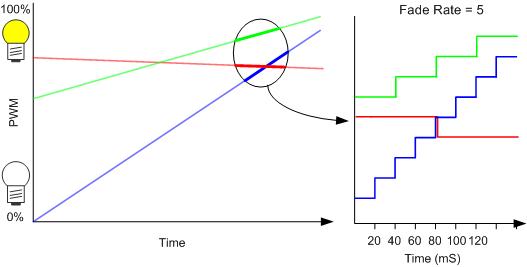
The 4mS step rate was chosen
because at the minimum fade rate of 1, a full fade from 0 to 100%
takes ~1 second.
If a fade is still in progress when
a new fade command is received, the current fade is stopped and a
new fade calculated based on the RGB PWM values currently reached
when the new command was received.
Autonomous fading is not available
in the free version of the firmware; SADs running the free version
will use the RGB data in packets with a fade rate value >0 but set
the fade rate to 0 and update the PWM output immediately.